Active knee-ankle-foot orthoses for spinal-cord injured subjects
A project was carried out whose objective was the design of active knee-ankle-foot orthoses for spinal-cord injured subjects with hip flexion, based on conventional passive bitutors that allow these patients to walk with the help of crutches (see reference [10] in the Publications section). This project led to the creation of the company ABLE Human Motion (https://www.ablehumanmotion.com/) to market this type of orthosis.
Active knee-ankle-foot orthoses for spinal-cord injured subjects
- Low cost
- Control through a mobile application
- Gait detection by sensor
- Patented system

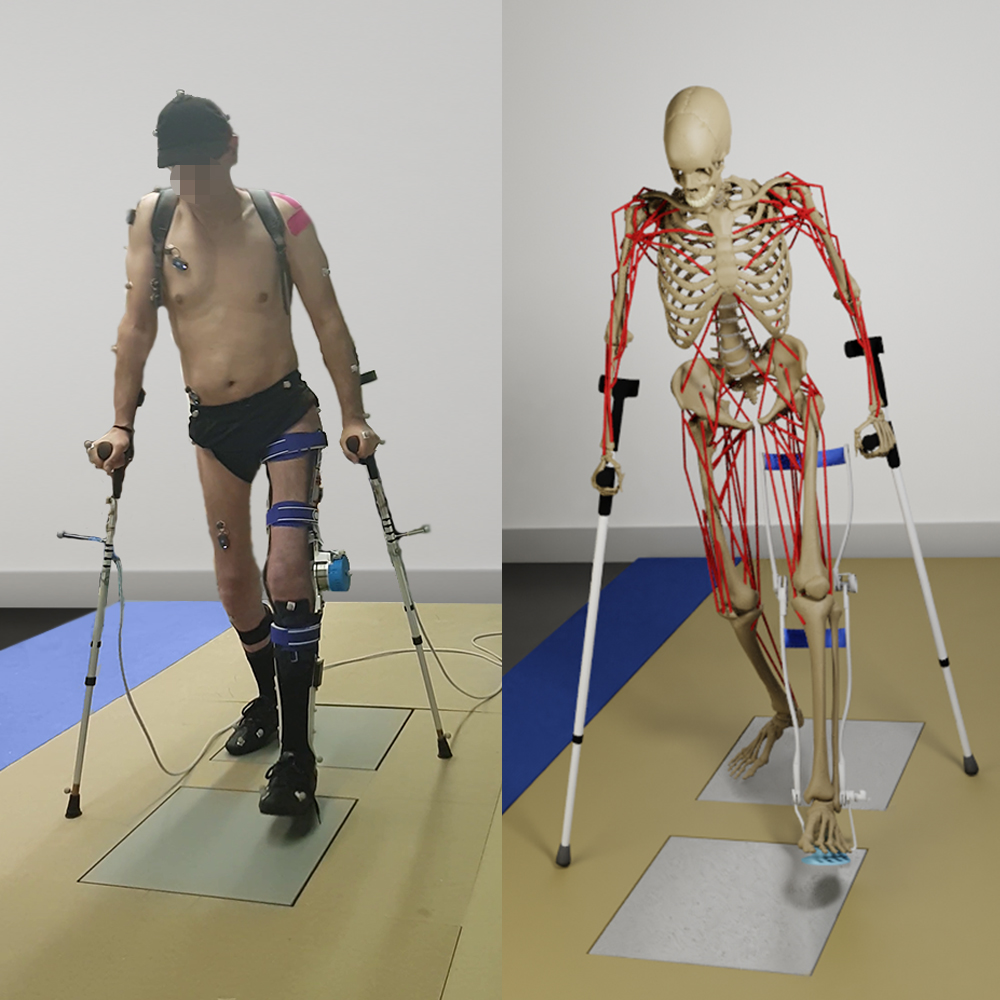
Gait analysis of a person with gait assisted by orthoses and crutches
- Customized musculo-skeletal model
- Kinematic: angles, velocities, gait patterns, etc.
- Dynamic: joint torques, external reactions, etc.
- Muscular: muscle activations and forces, joint reactions, muscle fatigue, energy consumption, etc.
Assistive device evaluation
- Evaluation of the adaptation process
- Objective comparison between devices
- Adjustment of the design variables from simulation

Evaluation of upper-body exoskeletons
A project was carried out to evaluate two upper-body exoskeletons that were intended to be used in ceiling welding operations. To this end, movement analyses of welders equipped with the exoskeletons were carried out, and kinematic, dynamic and muscular results were obtained, which made it possible to establish a comparison between both exoskeletons and decide which was the most suitable for the intended task.

Motion analysis
- Simulation of the real environment in the motion analysis laboratory
- 18 infrared cameras
- 3 force plates (with configurable positions)
- 16 surface electromyography sensors
Exoskeleton evaluation
- Computer simulation for calculation of objective indicators
- Muscle activity
- Kinematics
- Dynamics
- Energy cost
